
Agricultores con tomates recién cosechados Omicrono
El robot que quiere jubilar a los agricultores: puede cosechar tomates con precisión en su punto justo de madurez
Un investigador japonés ha desarrollado un algoritmo de IA capaz de decidir qué frutos tiene más probabilidades de recoger con éxito.
Más información: El robot español para encontrar 'súpercereales' en el campo: busca variedades resistentes a enfermedades y sequías

Los robots humanoides capaces de trabajar en fábricas pero también de planchar la ropa o poner el lavavajillas en el hogar siguen centrando los esfuerzos de compañías como Tesla o la china Unitree. Mientras tanto, con menos ruido pero mayor impacto industrial, otros campos de la robótica siguen avanzando en sectores como la agricultura.
El objetivo es la optimización del rendimiento de los cultivos, el ahorro de agua, fertilizantes y pesticidas y la automatización de tareas pesadas o repetitivas, no sólo para librar a los trabajadores humanos del esfuerzo de largas jornadas en el campo, sino también por la escasez de mano de obra y para ahorrar costes a largo plazo.
Desde los años 80 del siglo pasado, los robots recolectores han avanzado hasta poder identificar y cosechar por su cuenta miles de toneladas al año de todo tipo de frutos, pero hay algunos que se les resisten por su forma o características.

Es el caso de los tomates y otros frutos, especialmente difíciles para los robots porque suelen conformar racimos en los que se mezclan ejemplares maduros y otros verdes, todos ellos rodeados de ramas, tallos y hojas. Eso frena la adopción comercial de los robots recolectores, que sigue estancada tras décadas de investigación y desarrollo.
El ingeniero japonés Takuya Fujinaga, de la Escuela de Posgrado de Ingeniería de la Universidad Metropolitana de Osaka, cree haber encontrado la solución a este problema.
En un estudio publicado en Smart Agricultural Technology, describe cómo un nuevo sistema de inteligencia artificial permite a un robot cosechador decidir qué tomates tiene más probabilidades de recoger con éxito y cuál es el ángulo más propicio para acercarse.
El robot puesto a prueba por Fujinaga se desplaza sobre raíles frente a las plantas y está equipado con brazos multiarticulados que terminan en una pinza de tres dedos, especialmente diseñada para sujetar el fruto sin dañarlo mientras lo desprende de su tallo. Los resultados han sido muy positivos, con más de un 81% de acierto en la cosecha de tomates en un invernadero altamente automatizado, un primer paso decisivo para este tipo de maquinaria.
La máquina que decide
"Esto va más allá de la simple pregunta '¿puede un robot recoger un tomate?', para pensar en '¿qué probabilidades hay de que la recolección sea satisfactoria?', lo cual es más significativo para la agricultura en el mundo real", explica el ingeniero en un comunicado de prensa de su universidad.
Así, la clave no está tanto en el hardware como en el cerebro del robot, un algoritmo de visión por computador (YOLOv8) capaz de detectar con precisión objetos en imágenes en tiempo real, en este caso tomates, tallos y pedúnculos.

El robot utilizado durante las pruebas de recolección de tomates. Omicrono
Este sistema no solo es capaz de localizar la posición de cada fruto, sino también de diferenciar elementos clave alrededor, como las ramas que podrían entorpecer la trayectoria de la pinza o la forma del pedúnculo que une el tomate al tallo.
Con esa información visual, se construye un modelo estadístico de regresión logística, una técnica habitual en ciencia de datos para estimar probabilidades a partir de variables binarias.
En el estudio se definen 26 variables de este tipo que describen aspectos muy concretos de la geometría del entorno del fruto: si hay otro fruto justo detrás, si una rama cruza la zona de aproximación, si el pedúnculo está por delante o por detrás del tomate...
Fujinaga introdujo cada una de esas variables en el modelo para estudiar cómo influían en el resultado final, si concluía con éxito o fracaso en la recolección, y qué factores tenían un impacto significativo en la tasa de éxito.

Una de las conclusiones más claras es que el pedúnculo es el elemento más importante: cuando se encuentra por delante del fruto en la trayectoria que seguiría la pinza, las probabilidades de fallo aumentan de forma notable, mientras que si está situado por encima del tomate, el éxito crece de manera significativa.
El modelo captura estas relaciones y las traduce en una probabilidad numérica que el robot usa para decidir si intentarlo o no, y desde qué lado: frontal, izquierda o derecha.
Tasa de éxito
En las pruebas realizadas, el robot se enfrentó a la recolección de 100 tomates en un entorno de invernadero automatizado. El sistema logró recoger con éxito 81 de esos frutos, con una clara preferencia por los ataques frontales, que sumaron 56 éxitos, frente a 16 por el lado derecho y 9 por el izquierdo.
Estos resultados muestran que, al permitir que el robot varíe la dirección de aproximación según el contexto, es posible esquivar obstáculos que en otros enfoques causan muchos fallos.
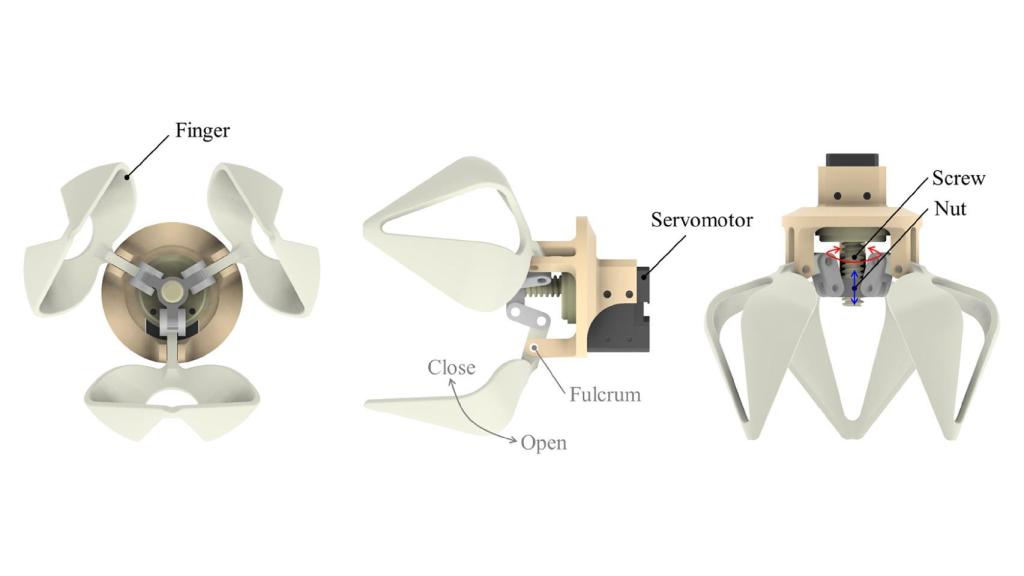
Diseño de la mano robótica de tres dedos para recolectar tomates. Omicrono
El estudio va más allá y también explora qué ocurre cuando el robot se vuelve más selectivo. Si el sistema se centra únicamente en los tomates cuya probabilidad de éxito supera el 60 %, la tasa de acierto en esos intentos se eleva hasta el 92 %, lo que sugiere que es mejor ignorar ciertos frutos mal posicionados que perder tiempo en intentos condenados al fracaso.
Esta estrategia puede resultar especialmente útil en entornos comerciales, donde el tiempo de operación del robot y el número de movimientos fallidos tienen un impacto directo en la rentabilidad de la inversión.
Más allá de las cifras concretas, el trabajo apunta hacia una nueva generación de robots agrícolas capaces no solo de ver el entorno, sino de razonar probabilísticamente sobre él y ajustar su comportamiento en consecuencia.
Integrar análisis estadístico y visión artificial permite una toma de decisiones que se adapta a cada fruto y a cada racimo en función de su configuración específica.

Esta investigación constituye un paso importante hacia robots que puedan operar de forma autónoma y repetible durante largas jornadas en granjas e invernaderos comerciales, reduciendo la dependencia de trabajadores humanos para tareas monótonas y muy exigentes físicamente.
"Se espera que esto marque el comienzo de una nueva forma de agricultura en la que los robots y los seres humanos colaboren", explica el autor del estudio. "Los robots cosecharán automáticamente los tomates que sean fáciles de recoger, mientras que los seres humanos se encargarán de las frutas más difíciles".
Fujinaga reconoce, no obstante, que aún existen limitaciones. Factores como la variabilidad en la fuerza necesaria para desprender el fruto, el control fino de los dedos de la pinza o los cambios de iluminación y densidad del follaje entre distintas plantaciones siguen siendo desafíos tecnológicos pendientes de resolver.
Para seguir mejorando el porcentaje de acierto y añadir nuevas funciones, el ingeniero plantea utilizar gemelos digitales, simulaciones realistas de invernaderos en las que entrenar y refinar los algoritmos antes de desplegarlos en instalaciones reales, lo que reduciría los costes y aceleraría el desarrollo.



