Pese a la evolución de la tecnología, muchos robots inteligentes necesitan ser programados y entrenados para manejar un objeto en concreto. Dicha situación limita en exceso a este tipo de máquinas.
Por esta razón, un grupo de expertos ha creado un nuevo sistema que permite a los robots manipular objetos que observan por primera vez.
Recoger y manejar objetos sin haberlos visto antes
El Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT ha desarrollado un nuevo sistema que permitirá a los robots dar un paso más adelante. Éste logra que las máquinas puedan recoger y manipular un objeto pese a ser la primera vez que lo ven.
kPAM
Este innovador sistema, llamado kPAM, emplea la IA para detectar diferentes puntos clave en 3D. Los investigadores del CSAIL afirman que su tecnología es más precisa que otras similares. Una vez detecta las coordenadas de un objeto determina lo que puede hacer con él.
En definitiva, permite entender un poco más del objeto en cuestión y conocer las tareas de manipulación que se pueden realizar. Así, puede observar una taza y agarrarla por el asa; u observar un par de zapatos y colocarlos en una estantería. Todo ello sin haber visto antes estos objetos.
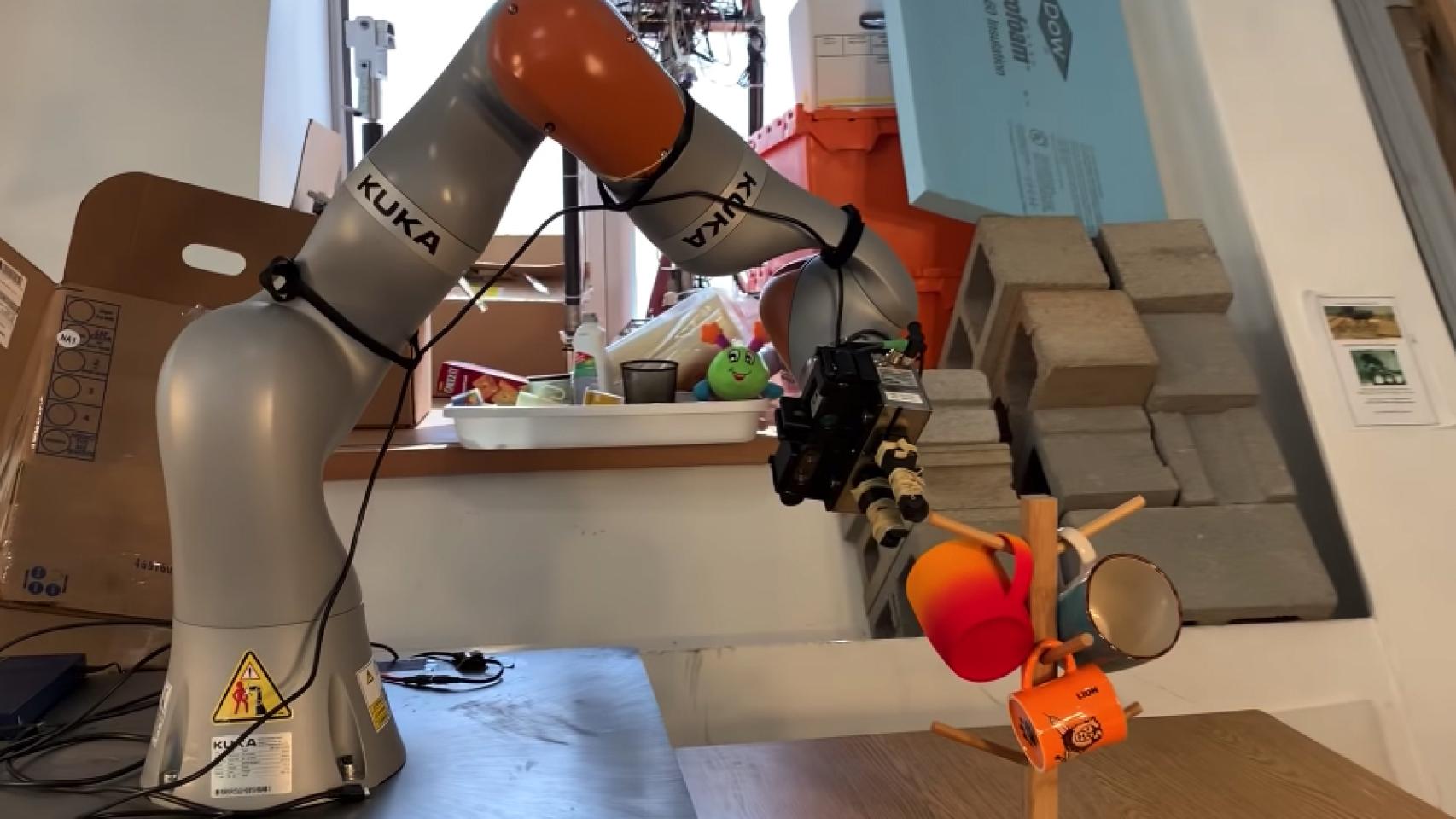
Manipular tazas y zapatos
El equipo del CSAIL ha realizado sus experimentos con un robot Kuka IIWA LBR con un sistema de agarre Schunk WSG 50. El robot consiguió colocar en 98 de cada 100 ocasiones los zapatos en el estante. Estos fallos tuvieron lugar cuando el brazo robótico cogió el zapato por el talón.
Respecto a las tazas, se agruparon 40 con diferentes formas, tamaños y apariencia visual. El robot logró agarrarlas todas cuando estaban colocadas verticalmente; sin embargo, solo tuvo éxito con 19 cuando estaban en posición horizontal debido al movimiento limitado de la pinza.
Las tazas se colocaron en el estante a tan solo 5 centímetros de la ubicación exacta en todas las pruebas; excepto en dos, en las que la taza se colocó al revés. También hubo errores cuando las tazas eran demasiado pequeñas. Los investigadores atribuyen los errores a una detección inexacta de puntos clave.
Pese a los pequeños fallos, los investigadores aseguran que el sistema kPAM ofrece una mayor flexibilidad que la mayoría de métodos actuales. Además, creen que se puede mejorar hasta lograr que los robots consigan hacer tareas como vaciar el lavavajillas; limpiar cocinas; y trabajos de recogida y colocación en fábricas.
Noticias relacionadas
- Estos robots microscópicos son tan diminutos que se mueven a base de vibraciones
- Tomar curvas peligrosas con la moto será menos peligroso con esta IA avisándonos
- El cofundador de Siri se une al equipo de Sherpa, el asistente inteligente español
- Intel crea un "cerebro" digital con 8 millones de neuronas, imitando a los nuestros