robotscirujanoscontacto1
Este sensor 3D permite a los robots cirujanos ser más precisos
Este diminuto sensor dota a los robots cirujanos con tacto, haciéndolos mucho más precisos que nunca.
Noticias relacionadas
- India lanza la misión que le puede convertir en el cuarto país en llegar a la Luna
- Airbus presenta un avión con las alas de un ave de presa, ¿el futuro de la aviación?
- Tu nuevo fondo de pantalla ha sido posible gracias a una vela solar
- Duro como una piedra o blando como la gelatina: este material dinámico cambia con la iluminación
Este diminuto sensor dota a los robots cirujanos con tacto, haciéndolos mucho más precisos que nunca.
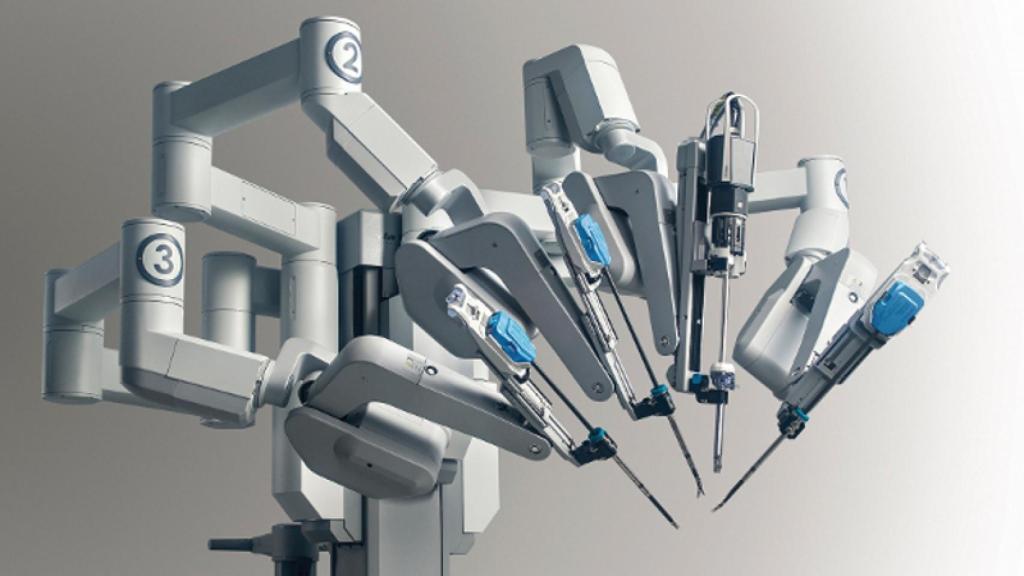
Hoy en día es relativamente normal ser operado por robots en situaciones difíciles, en las que un error humano puede determinar el éxito de la intervención. Tanto es así, que incluso en alguna ocasión se ha llevado esta tecnología al espacio, lo que dice de su índice de confianza y viabilidad.
Sin embargo, uno de los mayores compromisos que la tecnología tiene con la medicina, es tratar de reducir al mínimo el impacto que puede llegar a tener la automatización de determinadas acciones, puesto que suele haber mucho en juego.
Robots cirujanos con tacto para aumentar su eficacia
robotscirujanoscontacto2
Los robots cirujanos ya han demostrado reducir el riesgo de infecciones tras intervenciones quirúrgicas, así como reducir en muchas ocasiones la estancia hospitalaria postoperatoria. Utilizar esta tecnología reporta enormes beneficios a la medicina, pero hay situaciones en las que, hasta ahora, el sentido del tacto humano era imprescindible, algo que podría cambiar a partir de ahora.
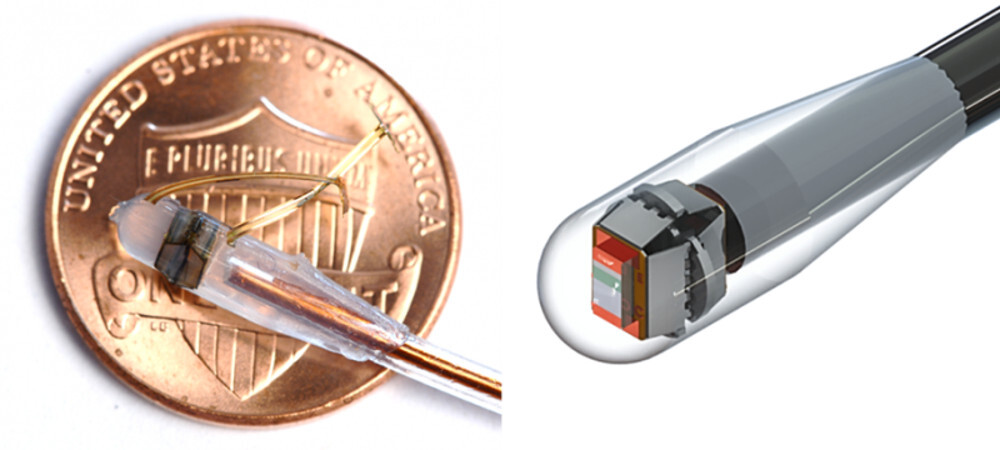
Como decimos, estos robots contarán con aún más precisión y eficacia gracias a este pequeño sensor 3D desarrollado por Robert J. Wood y Conor Walsh, ambos científicos del Wyss Institute de Harvard. El sensor está formado por cuatro capas de acero inoxidable apiladas a modo de sandwich y laminadas con un mecanismo de polímero flexible, que consigue un sistema de autodespliegue para el momento de su uso.

robotscirujanoscontacto3
En ese momento, tan solo se necesita sumergir previamente el sensor en un baño de ultrasonidos para desplegar el mecanismo. Además, la superficie de contacto es de unos 2,7mm, algo que lo hace ideal para ser utilizado en endoscopios de 8,6mm de diámetro. Para su control se utiliza sensor fotoeléctrico. A medida que las capas se pliegan en contacto con cualquier superficie, estas deforman el polímero flexible acercando un emisor de luz al fotodetector, permitiendo un control de máxima precisión sobre la superficie a tratar.
El siguiente paso, de acuerdo a sus desarrolladores, es hacerlo más robusto a la vez que disminuir aún más las proporciones del dispositivo, para conseguir algún día un sentido del tacto para robots comparable con el del ser humano. Lo que abriría, sin ninguna duda, nuevas puertas a la robótica no solo en medicina.
Vía | SEAS Harvard



