openai dyctl inteligencia artificial
Una mano robótica aprende a trabajar por sí sola sin ayuda humana, ni ejemplos
No todos los robots tienen la capacidad para aprender por sí solos; de hecho, esto sería lo ideal. Este brazo, en cambio, sí que aprendió todo sin ejemplos.
Noticias relacionadas
- Estos robots microscópicos son tan diminutos que se mueven a base de vibraciones
- Tomar curvas peligrosas con la moto será menos peligroso con esta IA avisándonos
- El cofundador de Siri se une al equipo de Sherpa, el asistente inteligente español
- Intel crea un "cerebro" digital con 8 millones de neuronas, imitando a los nuestros
Recoger algo del suelo es algo tan sencillo que ni pensamos en ello; lo mismo con casi cualquier movimiento que hacemos con las manos a lo largo del día. Pero en realidad, es un largo proceso de aprendizaje que llevamos toda una vida perfeccionando. Por lo tanto, para un robot, aprender a manejar unas manos es una ardua tarea, y más si necesita aprender por sí sola y sin ayuda humana, así como sin ejemplos.
No importa si estás levantando un vaso vacío, o un pesado extintor; tu cerebro simplemente será capaz de enviar las señales adecuadas para que tú puedas levantar correctamente el objeto. Lo mismo si estamos apretando un tornillo o conduciendo un coche. Hemos pasado por un aprendizaje previo que nos los permite.
El robot que aprendió por sí solo, literalmente, a manejar objetos
openai dyctl
Y es que es así como aprenden los robots, con ejemplos. Pero tienen un problema al aprender de nuestros ejemplos: están limitados a nuestra inteligencia y a nuestras capacidades. Por ello, lo idea es que la Inteligencia Artificial no aprenda de nosotros, sino que adquiera la experiencia por sí sola. Pero esto no es siempre posible; de hecho, pocas veces se puede replicar.
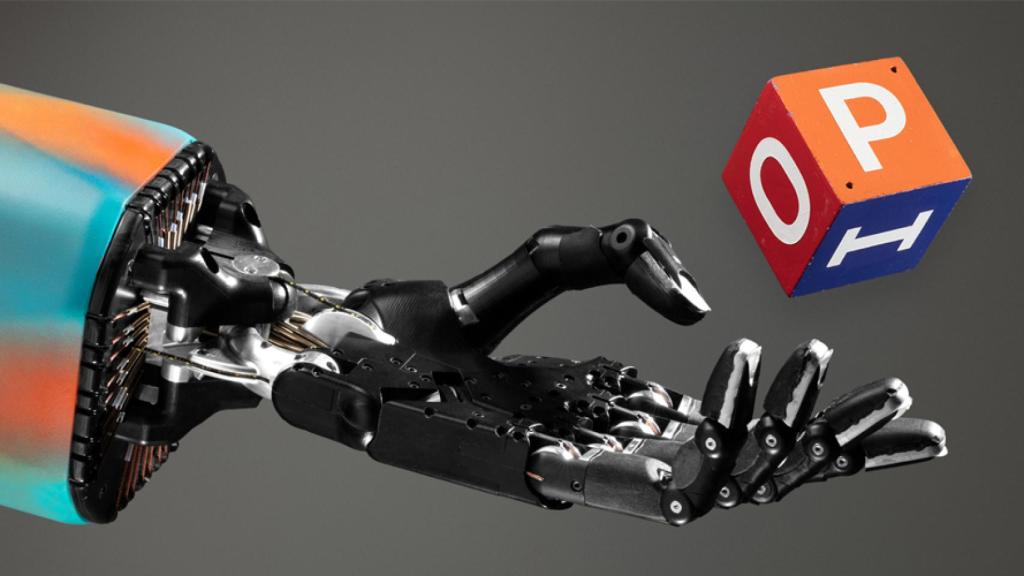
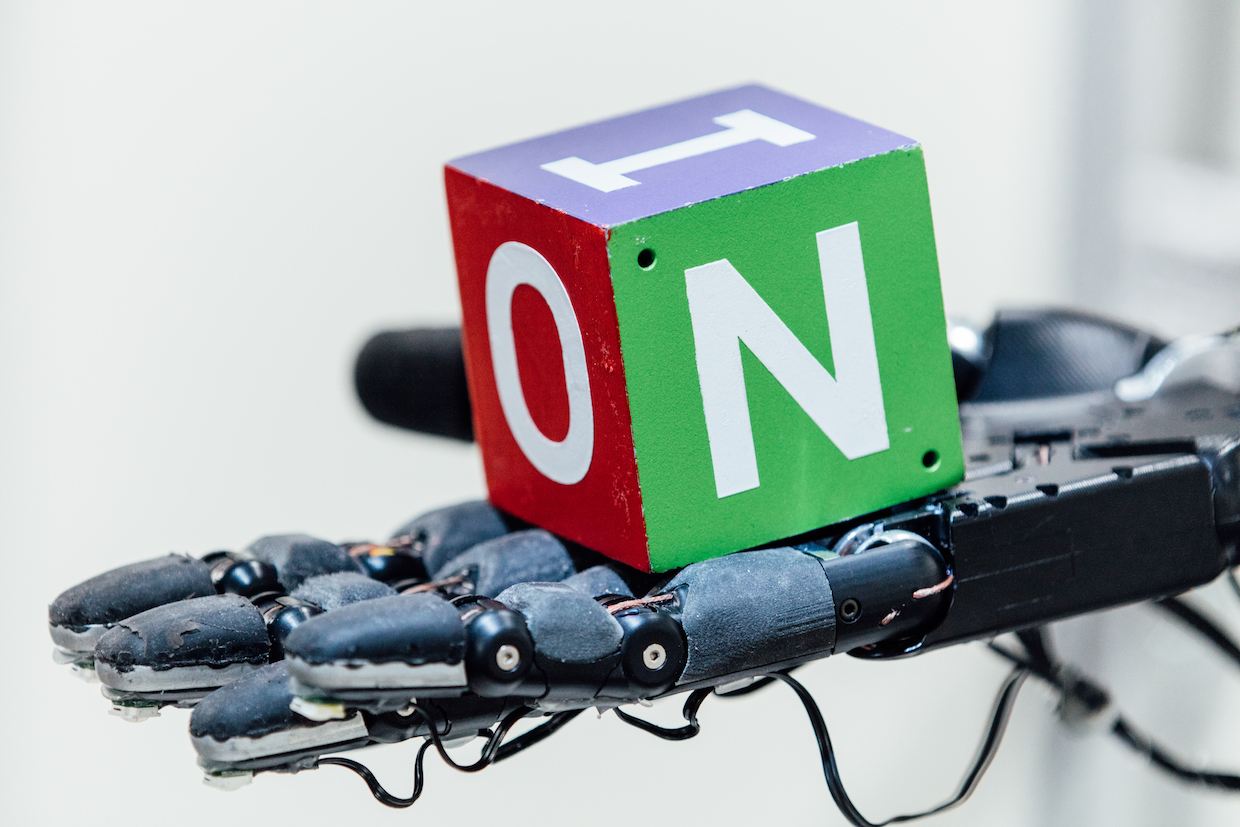
OpenAI, por ejemplo, lo ha conseguido con una mano robótica, que es capaz de funcionar completamente como una humana. Y ya es difícil, pues si aprender algo por sí solo es difícil, replicar los movimientos humanos lo es aún más, quizás. La máquina aprendió, efectivamente, como nosotros: con el ensayo y error.
La máquina, que recibe el nombre de Dactyl, operó lo equivalente a 100 años de ensayo y error en tan solo 50 horas, para lo que fueron necesarios 6144 CPU y 8 GPU. Pero no es solo la potencia de computación, sino que también es más capaz, de media, que el brazo robótico medio.
Por ejemplo, mientras que un robot estándar tiene 7 grados de movimiento, este tiene hasta 24 grados. Además, cuenta con tres cámaras colocadas en diferentes posiciones que permiten visualizar el objeto con el que está tratando desde diferentes posiciones. Por ello, puede agarrar cualquier tipo de objeto siempre que quepa en su mano; no ha aprendido a manejar solamente algunos tipos de objetos, sino todo lo que pueda agarrar, más bien.



