
Perro robot. Omicrono
Este perro robot tiene una espalda articulada para escalar y subir a sitios imposibles
El dispositivo ha sido desarrollado por el mismo equipo que hace escasos meses puso a un humanoide electrónico a conducir.
Más información: El perro robot creado por unos jóvenes estudiantes para ayudar a los bomberos: apaga incendios con un peculiar cañón de agua

En el mundillo de los robots y de la robótica avanzada, un factor de forma ha destacado enormemente: el cuadrúpedo. Los llamados perros robots, que ya desactivan bombas y facilitan la vida de muchas personas, han resultado ser todo un reclamo en España.
Una ventaja de este diseño es que es posible iterar sobre él y mejorarlo. Esto han demostrado científicos del laboratorio de la Universidad de Tokio (JSK), que han desarrollado un perro robot que cambia un elemento clave para aumentar su versatilidad enormemente.
Y es que la mayoría de perros robot disponen de una parte superior (lo que sería la espalda) dura, rígida, pensada para transportar objetos. Los científicos han cambiado esta parte por una espalda articulada, dotándole de grandes características.
Un perro robot escalador
El factor de forma intrínseco de estos robots favorece muchas cuestiones logísticas. Que sean cuadrúpedos facilita el acople de todo tipo de equipos, les ayuda a ser más eficientes en terrenos difíciles y los hace ideales para transporte y otras tareas.
Sin embargo en ocasiones muy concretas, esta espalda rígida puede suponer un limitante. Los científicos de la JSK lo saben, y por ello su nuevo perro robot apodado KLEYN añade una parte intermedia articulable que separa su espalda en dos.
Robot KLEYN de JSK.
La separación está ubicada justo en medio de la cintura, y su función es clara: permite que esta espalda que de otra forma sería rígida pueda arquearse. De esta forma, KLEYN puede arquerarse para colarse por sitios, unir esta zona para reducir su tamaño y mucho más.
Las patas del robot delanteras cuentan con una posición contraria a las traseras, permitiendo que estas ejerzan suficiente presión contra estas paredes para mantenerlo en el aire. Esta es la conocida como escalada en bavaresa o en chimenea.

Esta parte 'separa' a KLEYN en dos partes, dos partes de un chasis idéntico revestidas de aluminio y que albergan la batería y el ordenador, así como el resto del hardware. nCuando escala por estas paredes, las articulaciones (con tres grados de libertad DoF) empujan un chasis contra el otro.
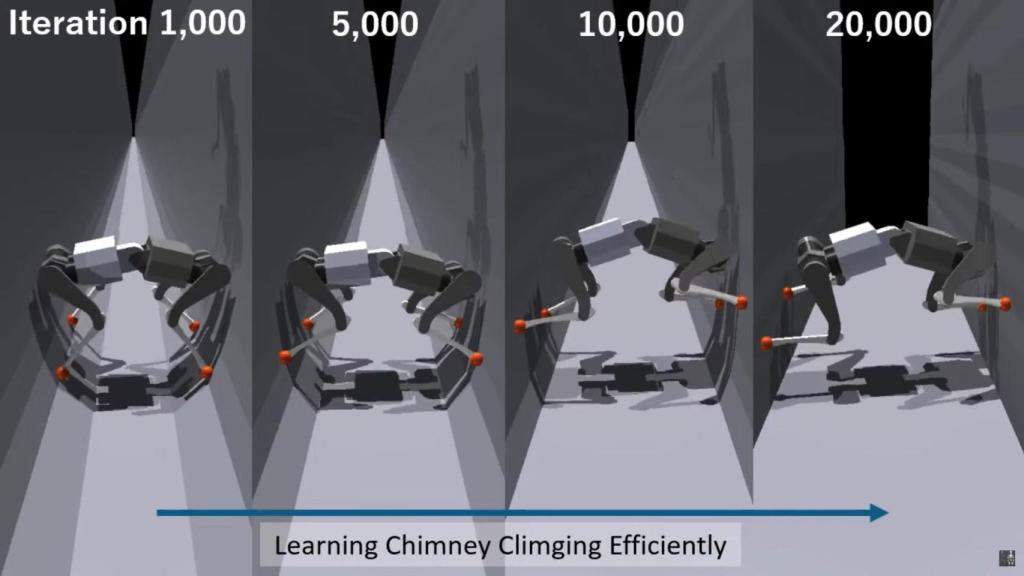
Por supuesto, esta idea fue puesta directamente a prueba. Usando una plataforma apodada como Aprendizaje Curricular Guiado por Contacto (un sistema de aprendizaje por refuerzo), permitieron que el cuadrúpedo pudiera trepar por el hueco de dos paredes estrechas, según relata New Atlas.

Ejemplo de KLEYN subiendo paredes. Omicrono
Después de realizar una serie de entrenamientos en espacios controlados virtuales, los científicos dispusieron un entorno de pruebas con dos paredes de contrachapado que formaban tres conjuntos de paredes, cada una con una separación de 800 a 1.000 milímetros.
El cuadrúpedo pudo subir por todas ellas. En los espacios de 800 milímetros, el robot pudo subir a una velocidad de 170 mm por segundo. Una hazaña considerable, teniendo en cuenta que hablamos de un perro de 13 kilos de peso y 760 mm de largo.

A los tres grados de libertad de cada pata hemos de sumarle un sistema de articulaciones en hombros y rodillas. Todas las articulaciones de las patas tienen actuadores con una relación de reducción de 1:10 y un par de 25 Nm.
Respecto a la articulación de la cintura, esta tiene un único grado de libertad y una relación de reducción de 1:9, con un motor de 40 Nm. Además de la batería y del ordenador de a bordo, las dos partes del chasis separadas integran una unidad LiDAR con un Unidad de Medición Inercial (IMU).
Entorno virtual de pruebas. Omicrono
La versatilidad que este simple cambio en el cuerpo otorga es enorme. No solo porque el robot ahora pueda escalar todo tipo de huecos (chimeneas, espacios separados entre dos paredes...) sino por sus potenciales aplicaciones.
Este diseño más versátil podría además beneficiar a los clásicos campos a los que están dedicados estos robots, como las operaciones logísticas y de búsqueda y rescate, entre otros. Incluso podría tener aplicaciones en entornos como la defensa.



