Robot WORMS del MIT Omicrono
WORMS, el versátil robot del MIT para conquistar la Luna: se monta como un Lego y es multitarea
Un equipo del Taller de Recursos Espaciales del MIT desarrolla unos robots configurables de fácil ensamblaje que pueden realizar distintas tareas.

La exploración espacial vive un momento dulce. Las noticias sobre nuevos cohetes y proyectos se suceden a una velocidad que hace apenas una década parecía impensable. Hasta España se ha apuntado a esta nueva carrera espacial con el Miura 1, el cohete que rivalizará con Elon Musk y cuyo lanzamiento tendrá lugar en las próximas semanas. Pero si hay una misión que ha despertado el entusiasmo a nivel global esa es Artemis que, tras el éxito de su primera etapa año pasado, plantea llevar astronautas a la Luna en 2025.
A largo plazo, los próximos pasos del programa Artemis implican construir bases permanentes en la Luna, y para ello los sucesores de Neil Armstrong y Buzz Aldrin necesitarán algo más que nuevos trajes y un duro entrenamiento. Los hábitats lunares de los humanos ya están sobre la mesa, incluso se contempla la presencia de centrales nucleares en la Luna como proveedoras de energía. Pero, para que esos ambiciosos planes se conviertan en realidad, será necesaria abundante mano de obra. ¿Qué pasaría si ese trabajo duro corriera a cargo de robots?
El problema principal de esta hipótesis es que los robots tendrían que ser muchos y muy diversos, cada uno de ellos especializado en llevar a cabo una acción o tarea específica. Por eso, un equipo de ingenieros del Taller de Recursos Espaciales del MIT trabaja en el desarrollo de un kit de piezas robóticas universales, al estilo de los sets de Lego, que los astronautas podrían utilizar para ensamblar fácilmente distintos tipos de robots para que realizaran las labores más diversas. Una investigación que cuenta además con el apoyo de la NASA, la National Science Foundation y la Fannie and John Hertz Foundation.
Más que gusanos
El sistema ideado por el equipo dirigido por George Lordos, instructor de posgrado en el Departamento de Aeronáutica y Astronáutica del MIT (AeroAstro), está pensado para superar algunas de las limitaciones que pueden tener los robots tipo rover en superficies como la de la Luna. Y es que vehículos como el R1, el robot centauro desarrollado por la agencia espacial japonesa JAXA y la empresa GITAI, pueden ser muy útiles, pero en terrenos escarpados como los de los cráteres lunares pueden encontrarse con obstáculos insalvables.
Todo empezó en 2022, cuando los estudiantes de posgrado del Taller de Recursos Espaciales del MIT aceptaron el desafío del concurso Breakthrough, Innovative and Game-changing (BIG) que organiza la NASA cada año. La competición planteaba el reto de desarrollar sistemas robóticos capaces de desplazarse por terrenos extremos sin utilizar ruedas.
El proyecto WORMS del MIT
El objetivo era entonces diseñar un robot capaz de desplazarse por terrenos como los del polo sur de la Luna, donde el polvo espeso, las laderas escarpadas y rocosas y los profundos tubos de lava conforman un paisaje especialmente desafiante. Es un entorno clave para la exploración lunar, ya que alberga regiones que podrían contener agua congelada. Si se consigue acceder a esos depósitos, sería un paso crucial para las misiones Artemis, ya que facilitaría enormemente el suministro de un elemento vital para las futuras colonias humanas en la Luna.
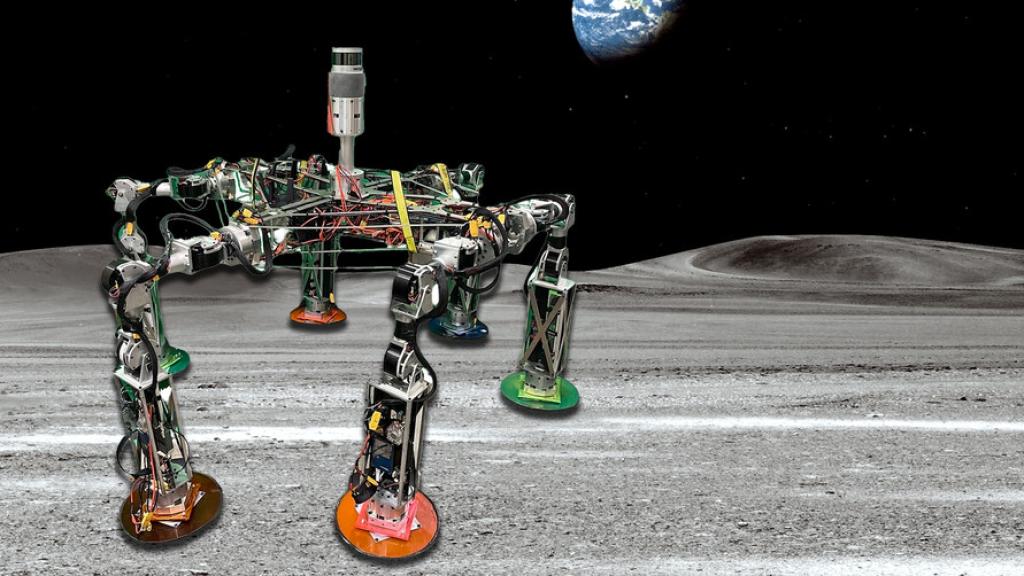
El "sistema de sistemas" ideado por el equipo de Lordos fue bautizado como WORMS, siglas de Walking Oligomeric Robotic Mobility System. Es un nombre con más de un sentido, ya que worms en inglés significa gusanos, los animales en los que se inspiraron los responsables de este sorprendente proyecto. Tras descartar especies como las arañas, que podrían descender para explorar los tubos de lava, o los elefantes, capaces de transportar equipos pesados en pendientes pronunciadas, se decantaron por una criatura mucho más versátil.
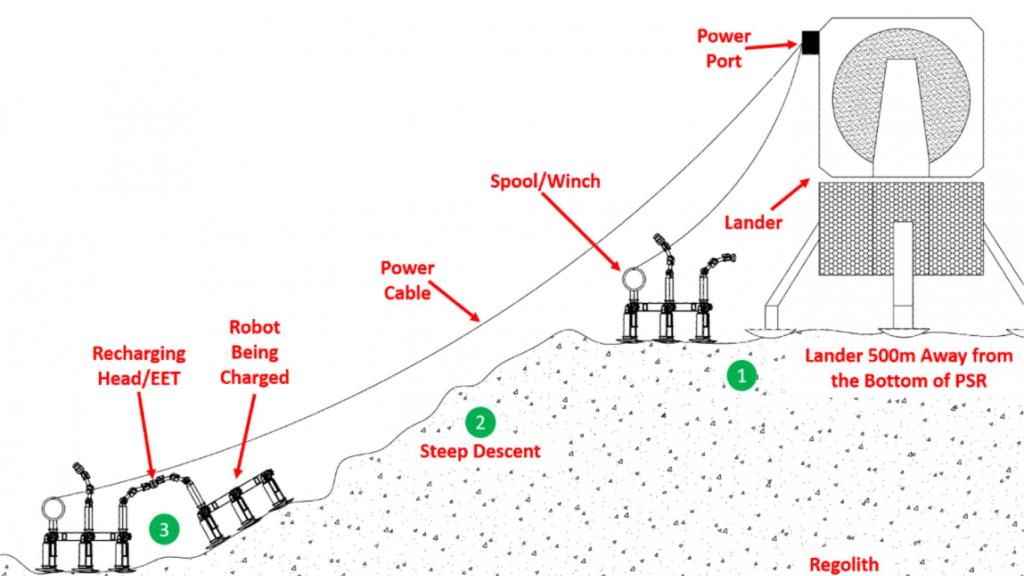
Diagrama de una de las posibles misiones de WORMS Omicrono
"Mientras pensábamos en estas inspiraciones animales, nos dimos cuenta de que uno de los animales más simples, el gusano, realiza movimientos similares a los de un brazo, una pierna, una columna vertebral o una cola", explica Michael Brown, jefe adjunto del equipo y estudiante de posgrado de AeroAstro. "Y entonces se me encendió la bombilla: podríamos construir todos estos robots inspirados en animales utilizando apéndices parecidos a gusanos".
Así, las piezas clave de estos robots configurables son unas extremidades robóticas con ciertas similitudes con los gusanos. Estas pueden ser encajadas fácilmente en un chasis que les permita funcionar juntas para conformar robots andantes de distintos tamaños y funciones. Dependiendo del tipo de misión, el astronauta podría construir, por ejemplo, un enorme robot preparado para transportar grandes bloques de paneles solares colina arriba. Ese mismo robot, pero con las piezas reconfiguradas para dar vida a un robot araña, podría servir para descender por un tubo de lava y perforar el suelo para buscar agua congelada.
[Rusia lanza la nave Soyuz MS-23 sin tripulación rumbo a la ISS para rescatar a 3 astronautas]
Lordos, al frente del equipo, ve muy claro su utilidad en el satélite terrestre: "podríamos imaginarnos una caseta en la Luna con estanterías de WORMS. Los astronautas podrían entrar, elegir los que necesitan, junto con los pies, el cuerpo, los sensores y las herramientas adecuadas, y encajarlo todo, para luego desmontarlo y hacer uno nuevo. El diseño es flexible, sostenible y rentable".
Prototipo de seis patas
Para demostrar su viabilidad, los responsables de WORMS construyeron un prototipo de seis patas, un robot articulado con sus propios motores, sensores, ordenador y batería. Aún así, las piezas principales del sistema siguen siendo los apéndices inspirados en los gusanos, y la base que sirve para unirlos todos. Su ensamblaje se lleva a cabo gracias a los bloques de interfaz universales, diseñados ex profeso para esta tarea, que permiten encajar cualquier pieza mediante un sencillo mecanismo de giro y bloqueo. Para desconectar las piezas, han pensado en una pequeña herramienta que libera los pasadores de resorte del bloque fácilmente.
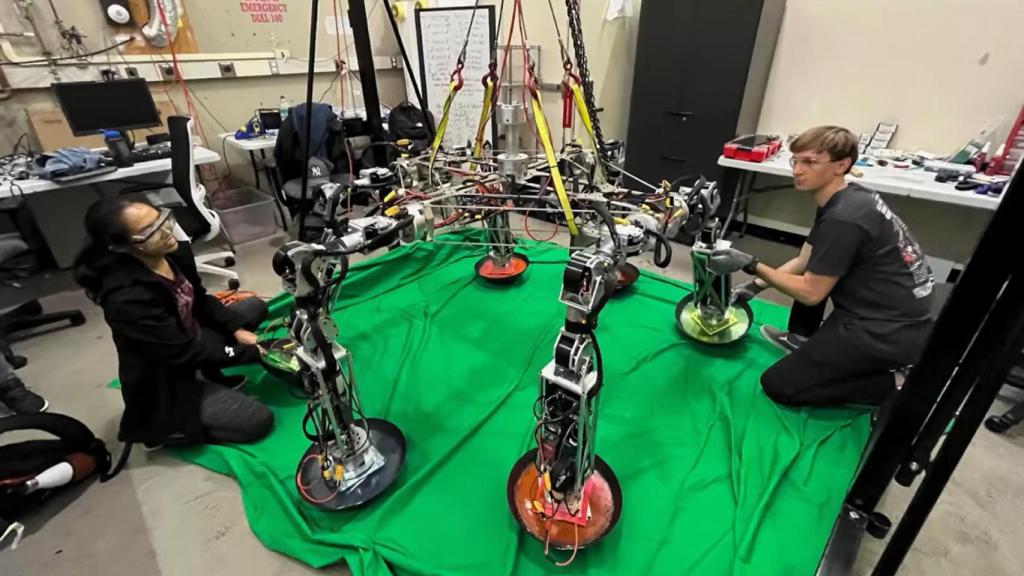
Dos de los miembros del equipo en el laboratorio junto con el prototipo de WORMS Omicrono
Otros accesorios diseñados por los estudiantes son pies con un diseño semiesférico para adaptarse a distintos tipos de terreno y un sistema LiDAR similar al que utilizan las aspiradoras tipo roomba, encargado de cartografiar el entorno para ayudar al robot a desplazarse. "En futuras iteraciones esperamos añadir más sensores y herramientas acoplables, como cabestrantes, sensores de equilibrio y taladros", afirma Jacob Rodríguez, uno de los participantes en el proyecto.
Además del hardware, Rodríguez y sus compañeros también desarrollaron un software capaz de coordinar múltiples apéndices. Eso les permitió demostrar que su prototipo, una vez montado, podía controlar sus extremidades independientes para caminar, tanto en el laboratorio como sobre el terreno, en un paraje desértico de California con ciertas similitudes con el paisaje lunar.
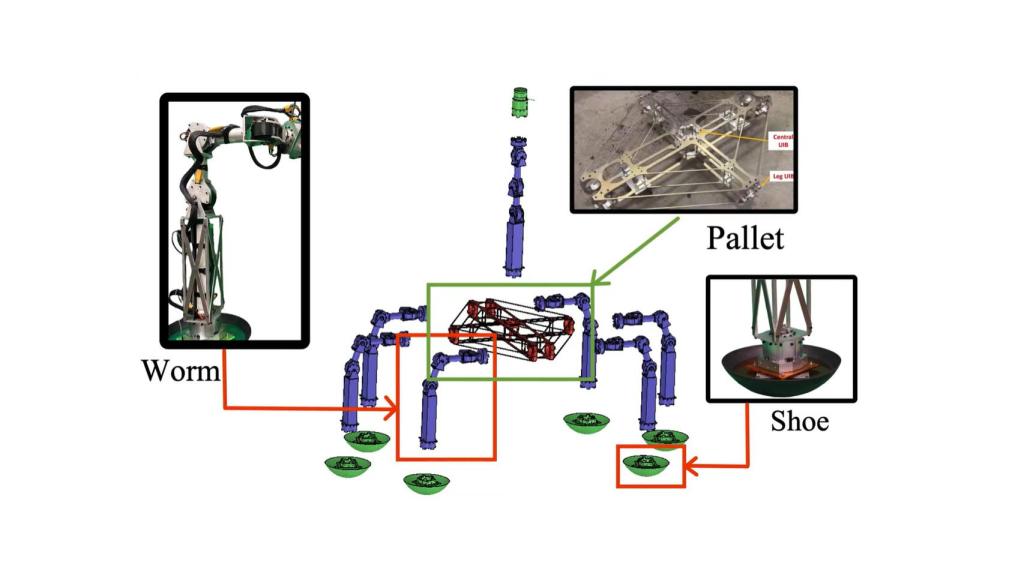
Diagrama con las piezas clave del robot Omicrono
Cada uno de los apéndices de WORMS mide 1 metro de largo y pesa cerca de 9 kilos. Con la gravedad lunar, eso se traduce en piezas de menos de 1,5 kilos, que los astronautas podrán manejar sin problema para ensamblar los robots in situ. Y este es sólo el primer prototipo, ya que el equipo prepara una nueva generación de WORMS, con extremidades más largas y algo más pesadas, diseñadas para construir robots de carga.
Kevin Kempton, ingeniero del Centro de Investigación Langley de la NASA, ejerció de juez en el BIG Idea Challenge de 2022 y es muy elocuente con respecto a las bondades del proyecto: "Hay muchas palabras de moda que se utilizan para describir sistemas eficaces para la futura exploración espacial: modular, reconfigurable, adaptable, flexible, transversal... El concepto WORMS del MIT incorpora todas estas cualidades y muchas más".
También te puede interesar:
- Viper, el rover de Tres Cantos que buscará agua en la Luna
- El rover Perseverance da el primer paso para encontrar vida en Marte
- El ingenioso método del MIT para tener satélites más baratos: sensores impresos en 3D
- El revolucionario robot con sentido del olfato que puede detectar explosivos, drogas y enfermedades



