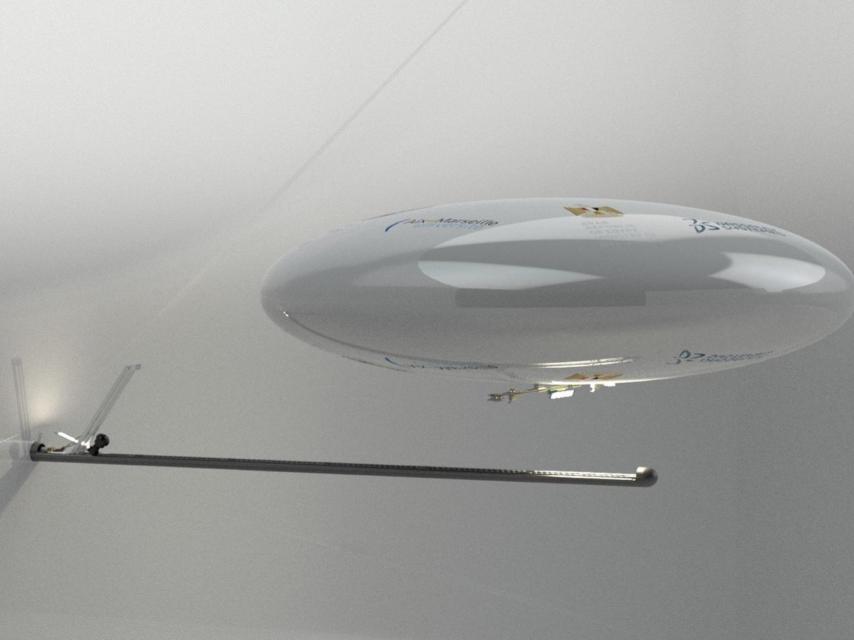
Los prototipos de los robots del profesor Jean-Baptiste Mouret.
Diminutos robots voladores para descubrir el enigma de la Gran Pirámide de Guiza
Para saber qué albergan las dos salas descubiertas en el interior de la construcción, un investigador francés ha inventado unos androides que accederían al interior tras perforar el muro.
El pasado noviembre los científicos al frente del proyecto Scan Pyramids informaron del hallazgo de dos cámaras desconocidas en el interior de la Gran Pirámide, de 138 metros de altura. El mayor de estos dos espacios desconocidos mide 30 metros y está ubicado sobre un pasadizo gigante conocido como la gran galería que conduce a la cámara funeraria de Keops. La habitación más pequeña se encuentra tras la cara Norte de la pirámide y consiste en un corredor cuya longitud no está clara.

El siguiente paso que planifican los investigadores del Heritage Innovation Preservation Institute es cómo acceder a las salas. Los científicos, tal y como anuncia Live Science, están desarrollando unos robots voladores que pueden acceder a la habitación más pequeña para utilizar una cámara de alta resolución una vez dentro. De la grande desconocen si está inclinada o es completamente horizontal. Si fuera así podría consistir en una o más cámaras.
De todas maneras, la hipótesis más probable que manejan es la que define este espacio como un corredor relacionado con la cámara más grande. “Podría ser un espacio que los constructores dejaron para proteger el techo muy angosto de la Gran Galería del peso de la pirámide”.
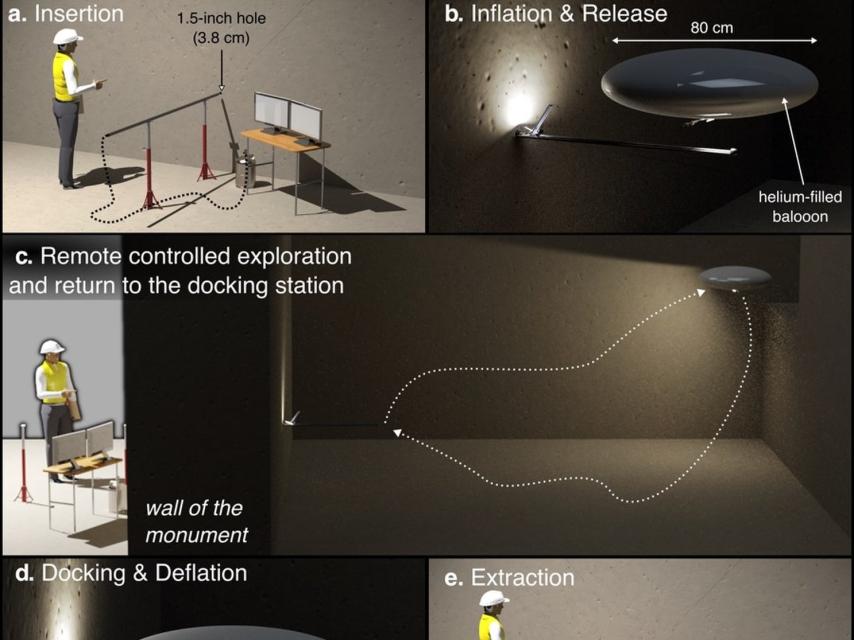
Plan de actuación del Inra francés.
Dado que la perforación de la pirámide con dinamita, como hizo el egiptólogo británico Howard Vyse a comienzos del siglo XIX, no es viable, los científicos franceses y japoneses que trabajan sobre la construcción quieren saber cómo se crearon estos dos misteriosos espacios vacíos en el centro de la Gran Pirámide. Para descubrir el enigma recurrirán de nuevo a la técnica de muones (unas partículas similares a los electrones) y a los mencionados robots, creados por otro equipo, dirigido por Jean-Baptiste Mouret, investigador del Instituto Nacional Francés de Informática y Matemática Aplicada.
Perforar la pirámide
Los pequeños robots voladores serían capaces de colarse por un agujero perforado, de 3,8 centímetros de ancho. Luego insertaría los pequeños robots a través de él y entrarían en la sala para mirar el interior del hueco desconocido de la pirámide de Guiza, construida entre el año 2509 a.C. y el 2483 a.C. El investigador ha informado a Live Science de la estrategia a seguir tras horadar la piedra que aísla ese espacio menor: primero desean mandar un robot explorador -scout, con forma de tubo- que básicamente es una cámara panorámica dotado con muchas luces.
“Si hay algo prometedor” extraerán el robot explorador para insertar el robot de exploración (blimp). Este es un dirigible volador que se pliega ara la inserción en el canal horadado y se infla de forma remota una vez se encentre en el interior de la sala. Este androide volador se moverá más rápido que si se desplazase por el suelo. Además, tomará fotografías desde más puntos de vista que un robot terrestre. Sin embargo, todavía no tienen ultimado el prototipo definitivo. Están trabajando en el diseño de un mecanismo eficaz de despliegue y plegado del dirigible.
Antes de poder perforar el muro deben saber dónde hacerlo. Y para ello, los científicos del equipo de Scan Pyramids tienen que precisar las dimensiones y la ubicación de la sala más pequeña. Por supuesto, el Ministerio de Antigüedades de Egipto también tendrá que dar la aprobación para realizar el agujero que dañaría la piedra e insertar los robots. Pero el equipo de análisis de muones no tendrá sus resultados listos antes de un año y medio.



